

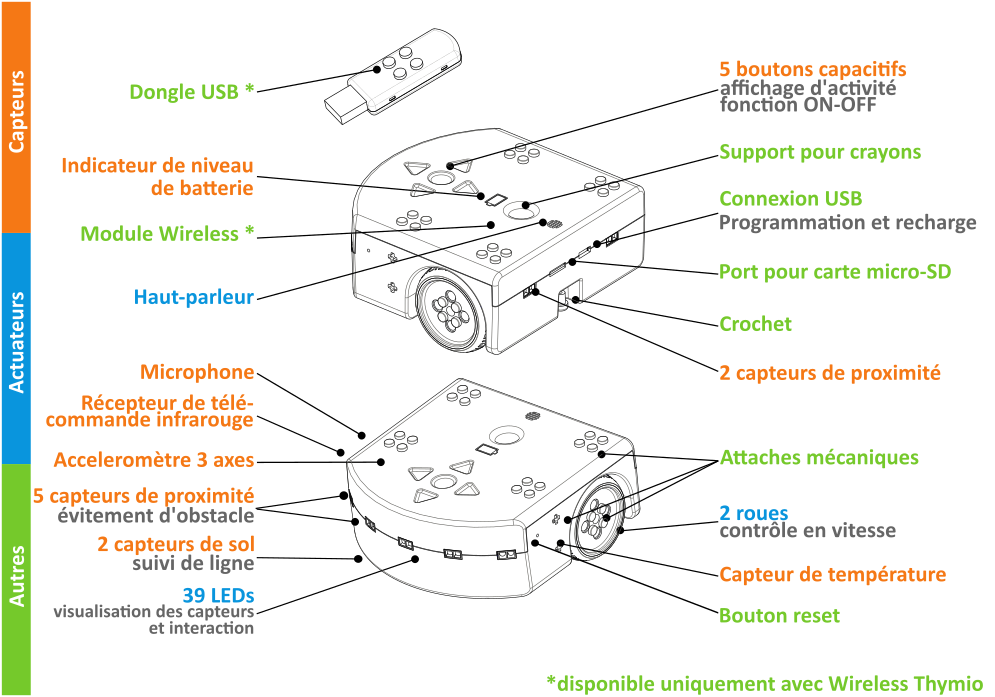
Composants du robot Thymio :
Recharger le robot :
 Pour recharger Thymio, il suffit de le brancher à un chargeur USB mural. Dans la mallette de prêt, vous trouverez un multi-chargeur USB vous permettant de charger 6 Thymio en même temps..
Pour recharger Thymio, il suffit de le brancher à un chargeur USB mural. Dans la mallette de prêt, vous trouverez un multi-chargeur USB vous permettant de charger 6 Thymio en même temps..
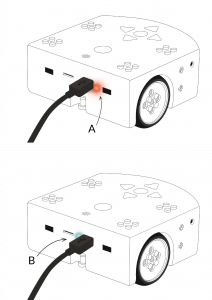
Lorsque Thymio est en charge, une lumière rouge s'allume près du port USB (A). S'il est allumé, les LED d'indication du niveau de batterie clignoteront. Vous pouvez charger Thymio lorsqu'il est allumé ou éteint.
Lorsque Thymio est chargé, une lumière bleue s'allume près du port USB (B).
Il est conseillé de conserver le Thymio chargé, surtout pour de longue période d'inutilisation. La décharge profonde peut endommager la batterie.
(source wiki.thymio.org)
Volume :
![]()
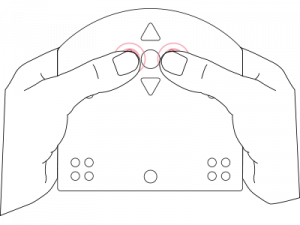
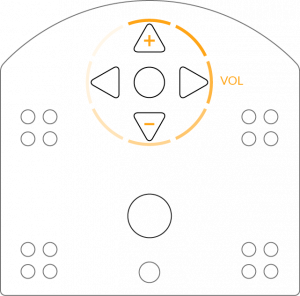
Vous pouvez choisir le volume du Thymio en touchant les boutons "avant" et "arrière". Vous voyez le volume réel sur le cercle de LED jaunes. Pour sauvegarder vos réglages et quitter le mode réglage, il suffit d'éteindre le Thymio en touchant le bouton central pendant 3 secondes.
Vitesse des moteurs (calibrage) :
![]() Pour vérifier que votre Thymio va droit, imprimez ce fichier PDF au format A3. Choisissez le mode violet et faites avancer Thymio. Vous pouvez considérer que le robot va tout droit s'il reste entre les lignes sur 40 cm. Dans le cas contraire, suivez la procédure expliquée ci-dessus et choisissez le mode vert clair. Les boutons "avant" et "arrière" font bouger le robot vers l'avant et vers l'arrière à différentes vitesses suivant le nombre de pressions. Essayez d'aller à des vitesses différentes (niveau 1 et 2) pour le calibrer. Les boutons "gauche" et "droite" permettent d'augmenter ou de diminuer la correction. Si le robot va vers la droite, appuyez sur le bouton gauche pour corriger la direction jusqu'à ce qu'il aille droit, et inversement. Lorsque vous êtes satisfait, appuyez sur le bouton central, cela va arrêter les moteurs et enregistrer les valeurs de correction dans le robot. Éteignez le robot. La vidéo ci-contre explique la procédure.
Pour vérifier que votre Thymio va droit, imprimez ce fichier PDF au format A3. Choisissez le mode violet et faites avancer Thymio. Vous pouvez considérer que le robot va tout droit s'il reste entre les lignes sur 40 cm. Dans le cas contraire, suivez la procédure expliquée ci-dessus et choisissez le mode vert clair. Les boutons "avant" et "arrière" font bouger le robot vers l'avant et vers l'arrière à différentes vitesses suivant le nombre de pressions. Essayez d'aller à des vitesses différentes (niveau 1 et 2) pour le calibrer. Les boutons "gauche" et "droite" permettent d'augmenter ou de diminuer la correction. Si le robot va vers la droite, appuyez sur le bouton gauche pour corriger la direction jusqu'à ce qu'il aille droit, et inversement. Lorsque vous êtes satisfait, appuyez sur le bouton central, cela va arrêter les moteurs et enregistrer les valeurs de correction dans le robot. Éteignez le robot. La vidéo ci-contre explique la procédure.

![]()